






功率因数
线性电路

一功率因数为1的电路,其电压、电流、瞬时功率及平均功率( φ φ --> = 0 {\displaystyle \varphi =0} , cos --> φ φ --> = 1 {\displaystyle \cos \varphi =1} ),由于平均功率(深蓝色线)均在X轴上方,所有功率均为实功,被负载所消秏
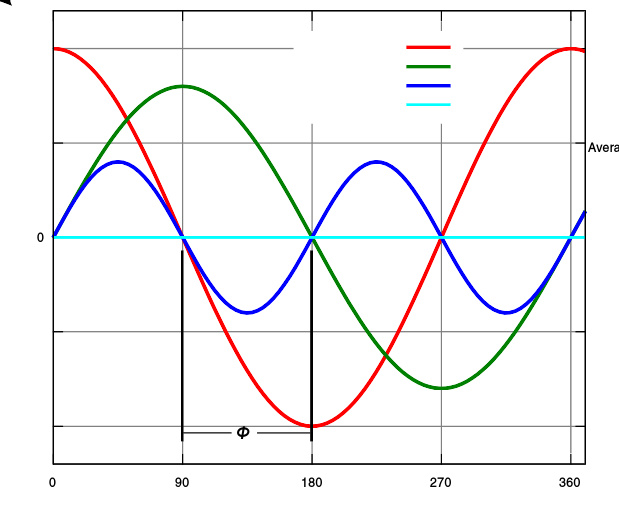
一功率因数为0的电路,其电压、电流、瞬时功率及平均功率( φ φ --> = 90 {\displaystyle \varphi =90} , cos --> φ φ --> = 0 {\displaystyle \cos \varphi =0} ),由深蓝色线可以看出前四分之一个周期,功率暂时储存在负载,接下来四分之一个周期,功率由负载回到电网,因此没有消耗实功
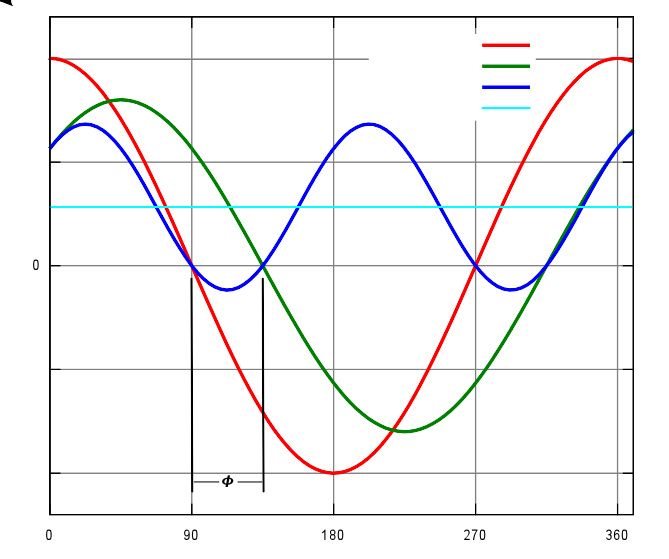
一功率因数落后的电路,其电压、电流、瞬时功率及平均功率( φ φ --> = 45 {\displaystyle \varphi =45} , cos --> φ φ --> = 0.71 {\displaystyle \cos \varphi =0.71} ),由深蓝色线可以看出在标示φ的那段时间,部分功率由负载回到电源端
对于纯电阻的交流电路,电压和电流的相位相同,每个周期在同一个时间变换正负号,因此所有进入负载的能量都被负载消耗。当负载有电抗成分时(例如其中有电容或电感),部分能量会储存在负载中,因此电压和电流之间会有时间差(相位差)。在每个交流电压的周期中,除了负载消耗能量外,会有额外的能量暂时储存在负载的电场或磁场中,在稍晚的时间会将能量由负载送回电源端。这些未产生实功的能量在负载和电源端往复流动,增加导线上的电流,因此若二个设备要输出相同功率,功率因数较低的设备会对应较大的输入电流。线性负载不会改变电流的波形,但会改变电流相对于电压的时序(即相位)。
若电路中只有纯电阻性的加热元件(如电灯泡、电炉等),其功率因数是1。若电路中含有电容或电感(如马达、螺线管阀、镇流器等),其功率因数会小于1。
定义及计算
交流电有三个成分:
实功率(real power,也称为有功功率,active power),以P来表示,其单位是瓦特(W)。
视在功率(apparent power),以S来表示,其单位是伏安(VA),是电压和电流有效值的乘积。
无功功率(reactive power),以Q来表示,其单位是 无功伏安/瓦尔/乏 ( 英语 : volt-ampere reactive ) (var) 。不过,另外三个不正确的写法也被广泛使用VAr, VAR, Var
功率因数定义如下:
对于纯正弦波的波形而言,P,Q及S可以用相量来表示,三个相量可以形成满足下式的相量三角形:
若 φ φ --> {\displaystyle \varphi } 是电流和电压之间的相位角,则功率因数等于此角的余弦 | cos --> φ φ --> | {\displaystyle \left|\cos \varphi \right|} ,且:
由于单位一致(瓦特、伏安及无功伏安的因次相同),依功率因数的定义可得其为介于0到1之间的无因次量。当功率因数等于0时,功率全部为无功功率,在负载和电源之间往复流动。当功率因数等于1时,所有功率都由负载所消耗。一般功率因数会标示“领先”或“落后”,以表示其电压相对电流相位角的正负号。
若接到电源的负载是纯电阻性的负载,电流和电压会同时变化,其功率因数是1,电能在每个周期都完全由电源流到负载端。像是变压器或是任何有绕线的马达等电感性负载,其电流波形落后电压波形。而像电容组或是直埋电缆等电容性负载,其电流波形会领先电压波形,这二种负载都会在交流周期中吸收部分能量,储存在电路的电场(由电容产生)或是磁场(由电感产生)中,稍后能量才会回到电源端。
若要产生1 kW的实功,若负载的功率因数为1,只需提供1 kVA的视在功率(1 kW ÷ 1 = 1 kVA)。 若负载的功率因数为0.2,就需提供5 kVA的视在功率(1 kW ÷ 0.2 = 5 kVA)。因此需要产生较大的功率,在发电及输电过程中的损失也会提高。
交流负载的输入功率可分为有功功率和无功功率,二者的相量和即为视在功率。无功功率的存在会使得有功功率小于视在功率,因此负载的功率因数会小于1。电感性负载及电容性负载都会产生无功功率,但二者造成的电流电压波形恰好相反:电感性负载会使电流波形落后电压波形,有时会称其为“消耗”无功功率;电容性负载会使电流波形领先电压波形,有时会称其为“产生”无功功率。
线性负载的功率因数修正
为了降低电力系统的传输损失并提升负载端的稳压程度,一般会希望负载可以有较高的功因,最理想的情形是将功因提升到接近1.0的数值。当负载端出现无效功率时,视在功率会随之提高。输电系统中若加入功率因数修正的设备,可以改善输电网络的稳定性,而功率因数修正后,视在功率下降,因此输电网络的效率也可以提升。一些因功率因数不佳,需要使用较高单位电费的客户也会进行功率因数修正,以提升功因,减少电费。
线性负载可借由调整负载的电抗成分而修正功率因数,使其接近1.0。若负载为领先功率因数,表示是因为负载中电容影响,使其电流波形领先电压波形,此时可以加入电感,抵消电容对功率因数的影响。反之,若负载为落后功率因数,表示是因为负载中电感影响,使其电流波形落后电压波形,此时可以加入电容,抵消电感对功率因数的影响。一般工业负载(如马达)多为电感性负载,因此常用加装电容器的方式来提升功率因数 。
当电感或电容元件开关时,可能会产生电压变动或是谐波噪声,而且可能会提高系统的无载损失。最坏的情形下,这些有电抗成分的元件可能会和系统中的其他元件共振,引起系统的不稳定及严重的过电压问题,因此需在经过工程分析后才能加装修正功率因数的电感或电容元件。

自由功率因数修正设备 1. 无功功率控制继电器; 2. 电网连结点 3. 慢速保险丝; 4. 限制突波电流的接触器5.电容器,可能是单相或是三相Δ接; 6. 供给控制电路及风扇电源的变压器
功率因数自动修正设备(automatic power factor correction unit)包括许多利用接触器切换的电容器。设备会量测电网中的功率因数,依功率因数用接触器切换电容器。依电网负载及功率因数的不同,设备会切换必要的电容器以确保功率因数在设定值以上。
除了使用电容器修正功率因数外,无载的同步马达也可以提供无功功率。同步马达产生的无功功率是其场激磁的函数,一般称为 同步调相机 ( 英语 : synchronous condenser ) 或同步电容器,一般会在启动后接到电网,运转时会有领先的功率因数,因此可以提供负载需要的无功功率,使电网的功率因数可以维持在一定值。
调相机的安装及运转和大型马达相同,其主要的好处是容易调整需提供的无功功率。同步调相机的部分特性类似电子式的可变电容器,但其需提供的无功功率和电压成正比,和电容提供无功功率和电压平方成正比不同,因此可以提升大型电网的稳定性。同步调相机一般会用在大型的工厂中,例如炼钢厂。
对于高压电源系统或是波动工业负载的功率因数修正,使用 静止无功补偿装置 ( 英语 : Static VAR compensator ) 或是 STATCOM ( 英语 : STATCOM ) 的比例正逐渐提高,相较于利用接触器切换的电容器组,这类装置可以更快速的补偿功率因数的瞬间变化,而且这类固态电子元件的保养及维护又比同步马达要简单。
非线性负载
电力系统上常见的非线性负载包括整流器(用在电源供应器中),或是像萤光灯、电焊机或电弧炉电弧放电的设备。由于这些系统的电流会因为元件的切换而中断,电流会含有谐波成分,其频率为电源系统的整数倍数。畸变功率因数(Distortion power factor)可用来量度电流的谐波畸变对其平均功率的影响。
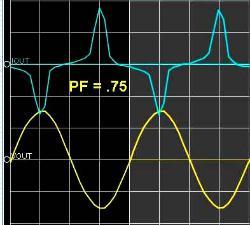
电脑电源供应器的弦波电压及非弦波电流,其畸变功率因数为0.75
非正弦波成分
非线性负载将电流波形由正弦波扭曲成其他波形。非线性负载的输入电流中除了原来电源的频率(基频)外,其中也会有许多高频的谐波电流成分。由电容器及电感器等线性元件组成的滤波器可以降低谐波电流由负载端进入电源系统中。
线性元件组成的电路若电压为一正弦波,其电流也是相同频率的弦波。其功率因数只是因为电压和电流之间的相位差,也可以称为位移功率因数(displacement power factor) 。若电流或电压非弦波,视在功率包括所有谐波成分时,功率因数中不但有电压和电流之间的相位差导致的位移功率因数,也会有对应谐波成分的畸变功率因数。
一般的三用电表无法量测非线性负载的输入电流 。三用电表会量测整流后波形的平均值。若使用量测均方根(RMS)值的电表,可以量测实际电流及电压的均方根值,因此也可以计算视在功率。若要量测有功功率或无功功率,需使用针对非正弦波电流设计的 瓦特表 ( 英语 : Wattmeter ) 。
畸变功率因数
畸变功率因数(Distortion power factor)量度电流的谐波畸变对其平均功率的影响。
THD i {\displaystyle {\mbox{THD}}_{i}} 为负载电流的总谐波畸变。上述定义假设电压仍维持正弦波,没有畸变,此假设接近一般实际应用的情形。 I 1 , rms {\displaystyle I_{1,{\mbox{rms}}}} 为电流的基频成分,而 I rms {\displaystyle I_{\mbox{rms}}} 为总电流,二者都以均方根值表示。
若将畸变功率因数乘以位移功率因数(displacement power factor,简称DPF),即可得到总功率因数,也可称为真功率因数,或直接简称为功率因数:
开关电源
开关电源是一种常见的非线性负载,世界上至少有数百万台个人电脑中有开关电源,功率输出从数瓦到一千瓦。早期廉价的开关电源中有一个全波整流器,整流器只有在电源端电压超过内部电容器的电压时才会导通,因此其峰值因数很高,畸变功率因数很低,而且在三相的电流系统中,其中性线电流不会为零,可能会有中性线负载过大的问题 。
典型的开关电源首先会用 桥式整流器 ( 英语 : bridge rectifier ) 产生直流电压,再由直流电压产生输出电压。由于整流器为非线性元件,其输入电流会有许多的高次谐波成分。此情形会造成电力公司的困扰,因为无法靠加入电容器及电感器的方式补偿高频的谐波成分。因此一些地区已开始立法要求所有功率大于一定值的电源供应器需要有功率因数修正机能。
欧盟为了提升功率因数,有设置谐波的标准。若要符合现行欧盟标准EN61000-3-2,所有输出功率大于75W的开关电源至少需要有被动功率因数修正(passive PFC)机能。而80 PLUS开关电源认证要求功率因数至少需到达0.9的水准 。
非线性负载的功率因数修正
被动(无源)功率因数修正
最简单降低谐波电流的方式是使用只含有被动(无源)元件的滤波器,此作法称为被动功率因数修正或无源功率因数修正(passive PFC)。
对于谐波电流,可设计一滤波器,只让基频(50或60Hz)频率的电流通过,滤波器可降低谐波电流,因此会使非线性元件的输入电流会和线性元件比较接近。若要使功率因尽可能接近1,需要使用电容器或电感器或两者并用。一般这类的滤波器需使用大电流的电感器,其体积也比较大。相较于主动功率因数修正(active PFC)的电感器,被动功率因数修正需要的电感器体积较大,但价格较低 。
除了使用电容器、电感器的组合外,也可以使用电容器组来修正负载的非线性电流,其中一个例子是使用填谷式电路。被动式功率因数修正的修正效果,电感器电容器组合电路修正后的功率因数在0.7至0.8之间,填谷式电路的则在0.9左右或更高一些。但效果仍不如主动功率因数修正,产生的热量较主动式功率因数修正的要大些 。
而被动功率因数修正的 电效率 ( 英语 : Electrical efficiency ) 一般较主动功率因数修正要好。电脑电源供应器的被动功率因数修正其效率一般到达96%左右,而一般主动功率因数修正效率约为94%。此外,一般被动式功率因数修正的电路会比主动式功率因数修正的要简单,工作更为可靠稳定。
主动(有源)功率因数修正
主动功率因数修正或有源功率因数修正(active PFC)是指可调整负载的输入电流,改善功率因数的电力电子系统,其主要目的是使输入电流接近纯电阻式负载的电流,使其视在功率等于有功功率 。理想状态下其电压和电流相位相同,而其产生或消耗的无功功率为0,使电源端可以最有效率的传递能量给负载 。
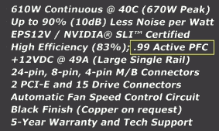
一个610W电源供应器上的标示,依标示可看出其中有主动功率因数修正,功率因数为0.99
以下是一些主动功率因数修正的分类:
Boost转换器(升压)
Buck转换器(降压)
Buck-boost转换器(升降压)
主动功率因数修正可以是单级的电能转换,也可以是多级的电能转换。
以电源供应器为例,Boost转换器会放在整流二极管和主电容器之间。Boost转换器会设法在输入电流和电压同相位及相同频率的条件下,维持其输出是一固定的直流电压。电源供应器中另一个开关电源将固定的直流电压转换为需要的输出电压。此作法会需要增加半导体开关及电子控制线路,但其被动元件的体积会比较小,在实务上常常使用。有主动功率因数修正的开关电源,功率因数最高可以到0.99,而没有功率因数修正的开关电源,其功率因数只有0.55–0.65 。
由于其输入电压的范围相当广,许多有主动功率因数修正的电源供应器可以配合输入电压自动调整,电压范围由100V(日本)到230V(欧洲),功率较大的笔记式电脑的电源供应器多半都有此功能。
在分布式电力系统中的重要性
若功率因数小于1.0,表示电力系统除了产生有功功率外,还要产生额外的功率,增加发电及输电的成本。例如一负载的功率因数为0.7,其视在功率为有功功率的1.4倍,其输入电流也会是1.4倍,因输电损失和电流平方成正比,输电损失大约会是2倍。而且系统中的所有元件,如发电机、导线、变压器等都需要因为额外的功率及电流也加大尺寸及额定,成本也随之提高。
一般电力公司会针对功率因数低于一定值(如0.9至0.95)的客户收取较高额的电费。工程师一般将功率因数视为影响电力传输效率的因素之一。
由于输电系统的效率及其成本逐渐受到重视,消费性电子产品中也开始加入主动功率因数修正的机能 。能源之星针对电脑的5.0版指南要求电源供应器在100%额定输出时的功率因数需到达0.9以上 ,根据英代尔及美国国家环境保护局的白皮书,电源供应器需要有主动功率因数修正的机能才可能符合能源之星电脑指南5.0版的要求 。
在欧洲,IEC 555-2规定消费电子产品中需要有功率因数修正技术 。
功率因数量测
单相电路(或平衡三相电路)的功率因数可以利用瓦特计-电流计-电压计的方式量测,将量测到的功率除以电流和电压的乘积即可。平衡的多相电路其功率因数和任何一相相同,不平衡多相电路的功率因数则没有一致的定义。
若功率因数表只要量测位移功率因数,可以用电动式的动圈式电表来制作,但在仪器上的移动线圈需改为二个垂直的移动线圈。仪器的磁场由负载电路中的电流产生。垂直的移动线圈分别为A和B,A线圈串接电阻后与负载线路并联,B线圈串接电感后与负载线路并联,因此B线圈的电流会较A线圈落后。在功率因数为1时,A线圈的电流会和负载电流同相,因此A线圈会产生最大的力矩,使功率因数表的指针指向1.0的刻度。若功率因数为0时,B线圈的电流会和负载电流同相,因此B线圈会产生力矩,使功率因数表的指针指向0的位置。若功率因数界于0和1之间,会依二个线圈产生力矩的大小决定最后指针的位置 。
数字化的仪器可以直接量测电压和电流之间的相位角,计算功率因数,也可以量测有功功率和视在功率,再计算功率因数。前者只能用在电压和电流为弦波的情形下,若电压和电流不是弦波,此方法只能计算位移功率因数。后者可适用于线性及非线性的负载。
记忆口诀
英语系的电力电子工程师有以下的口诀可以记忆电容器及电感器对应的电流/电压相位关系:
“ELI the ICE man”或“ELI on ICE”:在电感器(L)中电压(E)相位领先电流(I), 在电容器(C)中电流相位领先电压(E)。
“CIVIL”:在电容器(C)中电流(I)相位领先电压(V),电压(V)相位领先电流(I)是电感器(L)的特性。
“CIA”:在电容器(C)中电流(I)相位是领先的而单位则是安培(A)
“LV”:在电感器(L)中相位领先的是(V)电压和其单位福特
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。

相关资料
展开


- 有价值
- 一般般
- 没价值















推荐阅读

关于我们

APP下载


