





-
 QQ空间
QQ空间
-
 QQ好友
QQ好友
-
 微信好友
微信好友
-
 新浪微博
新浪微博
电活性聚合物
发展历史
电活性聚合物领域的相关研究可以追溯至1880年,威廉·伦琴设计了一项实验,将一端固定另一端附加重物的橡皮筋放在电场下,观察其长度变化。随后萨切尔多特(Sacerdote)在1899年将这个实验中电场下的应变响应公式化。直到1925年,第一种压电高分子材料——驻极体被发现。驻极体由巴西棕榈蜡、松香和蜂蜡熔化混合,通直流电冷却凝固制成,形成聚合物并展现出压电效应。
除了对电流的反应,聚合物对环境条件的反应也是该研究领域中的一个重点。1949年,阿哈龙·卡齐尔(Aharon Katzir-Katchalsky)等人发现胶原蛋白纤维在酸碱溶液中会发生体积变化。他们发现胶原纤维在酸性溶液中会膨胀,在碱性溶液中会收缩。尽管也有对其他刺激因素的研究,但由于电刺激的简易性和实用性,大部分的研究都将重点放在了对其仿生学的应用上。
直到20世纪60年代末电活性聚合物技术的研究才有了突破性进展。卡瓦依(Kawai)发现聚偏氟乙烯材料(PVDF)具有较大的压电效应。这激发了对其他可能具有相同性质的聚合物体系的研究。1977年,第一种导电聚合物被白川英树等人发现。他同艾伦·麦克德尔米德和艾伦·黑格发现聚乙炔具有导电性,并且在掺杂碘蒸气时其导电性会提升8个数量级,接近金属的电阻。到20世纪80年代晚期,已经有越来越多的聚合物被证实具有压电效应或者被发现具有导电性。
20世纪90年代初期,离子聚合物-金属复合材料(IPMC)逐步发展起来,并显示出远优于先前材料的电活性属性。离子聚合物-金属复合物的主要优点是这类材料能够在低至1或2伏特的电压下被激活形变,这要比之前任何电活性聚合物都要小几个数量级。这种材料不仅有更小的激活能,同时还能经受更大的形变,其最大应变可以达到380%。
1999年,约瑟夫·巴尔-科恩提出了“EAP机械手臂对人类掰手腕比赛”的挑战。这个挑战的目的是为了在全世界范围内,寻找能够设计出在掰手腕比赛中击败人类的EAP机械手臂的研究团队。第一届挑战赛在2005年“电活性聚合物致动器和设备大会”上举行。此外该领域的另一个里程碑式的事件是由日本的“Eamex”公司开发的第一个商业成熟的EAP人造肌肉设备。这家公司生产出一种机械鱼,能够靠尾部的EAP肌肉尾鳍在水中游动。不过该技术在实际开发的进度并不令人满意。
EAP材料分类
电活性聚合物可有多种不同的机制,但总体可以分为电子型和离子型两大类。
电子型
电子型电活性聚合物,即电场活性材料,通过电场中静电力作用诱导产生电致伸缩效应以及静电、压电和铁电效应。因为其整个过程不需要保持在溶液环境,也被称为干驱动体系。这种材料可在直流电场作用下产生诱导位移,例如介电弹性体,当加载电压后它将沿电力线方向产生收缩,并在与电力线垂直正交的平面内扩展延伸。这种材料通常需要较高的激励电场(>100V/μm),接近击穿电场。
铁电体聚合物
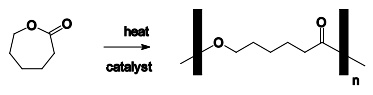
铁电体聚合物,或铁电聚合物,是一类具有铁电性的晶体极性聚合物。这类聚合物本身具有电子偶极距,当施加适当的电场后,这个偶极矩会反向。最常见的铁电体聚合物是聚偏氟乙烯(PVDF)和它的共聚物,具有良好的柔韧性并易制成大面积的薄膜,因而在音频和超声传感器、生物医学传感器、机电换能器以及热释电和光学器件中具有很大的应用前景。
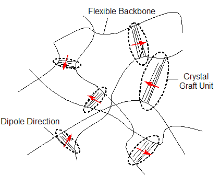
电致伸缩接枝弹性体示意图
电致伸缩接枝弹性体
电致伸缩接枝弹性体由弹性的聚合物骨架和接枝的可结晶极性基团组成。柔性的骨架结构提供无规态链结构,从而形成三维的网络结构,并与接枝结晶区域物理交联。主链与支链由带有电荷的极性单体合成,可以产生偶极矩,使结晶支链诱导极化。施加电场时,偶极子产生转矩作用刺激支链的极化单元旋转,主链局部重排,弹性体产生变形。
液晶弹性体
液晶弹性体长链分子之间的介晶基元使其可以相互滑行穿过彼此,使材料能够在很小的作用下即可以发生伸长现象。材料的单域向列相液晶弹性体和导电聚合物组合,通过向列相和各向同性相之间的相转变产生电活性,液晶侧链的重排使聚合物主链发生应变,从而产生驱动力。向列型和各向同性态之间的转换产生电活性,这种转换时间小于1秒。因其具有生物相容性,因此可以用来制备人造肌肉和微型设备等。
离子型
离子型电活性聚合物通过聚合物中的离子移动来驱动执行器。离子型电活性聚合物往往需要相对较低的电压和较大的电流,能量效率相对较低,需要持续供能来维持形状。典型的例子有导电聚合物、离子聚合物-金属复合材料和响应性凝胶。这类聚合物通常在液体电离环境下操作,因此常用于生物体环境下的应用。
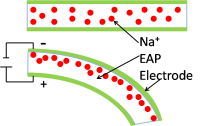
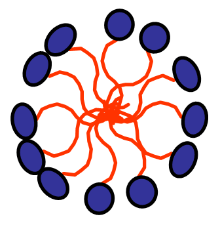
没有电场时IPMC中的阳离子随机散布。当加载电压后阳离子聚集导致聚合物向电极的一边弯曲
电流变液
电流变液是由悬浮颗粒分散于介电常数较低的绝缘液体中制得,颗粒直径在0.1-100μm范围内。当施加强度较大的电场时,由于诱导偶极距的运动,链会沿着电场方向排列,从而引起结构及粘度的改变,产生应变及其它特性,使电流变体从液体转变成黏弹性物质,响应时间可以达到微秒级。其潜在的应用包括减震器、发动机支架和声学阻尼器等。
离子聚合物-金属复合材料
典型的离子聚合物-金属复合材料(IPMC)由离子聚合物薄膜和镀在两表面的贵金属电极组成,离子聚合物膜内含有大量的阳离子以中和共价键合在聚合物骨架上的阴离子。这种复合材料可以在较低的驱动电压和低阻抗下产生较大的应变。电场导致离子浓度的改变,从而吸引水分子移向聚合物的一侧,导致层状结构向电极的一边弯曲。非均匀分布的水分子导致驱动器一侧溶胀而另一侧收缩。由于胶原纤维本身主要由自然带电离子聚合物构成,所以这类材料拥有良好的仿生应用前景。
特性描述
电活性聚合物具有多种特性,这里着重从三个方面描述:应力-应变曲线、动态力学热分析和介电热分析。
应力-应变曲线
应力应变曲线提供关于诸如聚合物脆性、弹性和屈服强度的机械性质信息。实验通过施加不断以统一速率增加的力并测量聚合物的应变。此项技术对于测定材料的脆性和强度很有用,但却是一种破坏性的实验。随着应力增加,聚合物会因此而折断。
动态力学热分析
动态力学热分析(DMTA)是一种非破坏性的技术,常用于分析分子层面的形变机制。在动态力学热分析中,聚合物会被施加正弦波动的动态压力,并根据聚合物的形变,测定出弹性模量和阻尼特性(假定该聚合物是谐振子)。弹性材料会将此机械能储存并转化为势能,稍后加以利用。一个理想的弹簧(无阻尼)会使用全部的势能恢复成原来的形状,而一个流体(高阻尼)的势能会在流动中丧失,无法恢复到原有的位置或形状。粘弹性聚合物会展现出综合以上两种表现的特性。
介电热分析
介电热分析(DETA)类似于动态力学热分析。但不同于动态力学热分析施加动态压力,介电热分析施加的是一个动态的电场。施加的电场可以导致样本极化,并且如果聚合物含有永久电偶极子基团,那么它们将会和电场匹配。电容率可以从变化幅度中测量出,并用于解决电介质存储器和损失组件的问题。电位移也可以根据电流变化测出。一旦电场消失,偶极子又会恢复到随机的偶极矩方向。
应用
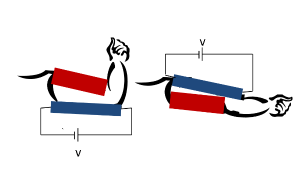
由电活性聚合物控制的手臂。当加载电压时(蓝色肌肉),聚合物伸长;当卸载电压时(红色肌肉),聚合物恢复到原始状态
由于高分子材料加工的便捷性,电活性聚合物可以被轻松地被制造成各种形状并用作各种用途。电活性聚合物的一个潜在应用是在微机电系统(MEMS)中来制造智能执行器。作为最有前景的实际用途研究方向,电活性聚合物常被用于人造肌肉中。其与生物肌肉相似的高断裂韧性、大驱动应变和固有振动阻尼能力引起了在此领域的科学家的注意。
此项技术也被用于可变盲文显示应用。针对视觉受损人群的快速阅读计算机协助交流,电活性聚合物可用于制作可变化的盲文凸点。
电活性聚合物可以用于材料形成小的脉冲。这些脉冲可以用于药物递送、微流控、主动流动控制和其他众多定制应用。脉冲装置最可能的构型是双膜片装置。离聚物泵所具有的优点是低电压操作、超低噪声信号、高系统效率和高精确流浪控制。
电活性聚合物所具有的独特性质的另一个技术应用是光学薄膜。由于执行器机械阻抗的低模量,它们能和常见的光学膜材料匹配。此外,单个的电活性聚合物执行器可以产生微米到厘米级的位移。因此这些材料可以被用作静电形状校正和抖动抑制。这些执行器也可以被用于校正由大气干扰产生的像差。
因为这些材料所展现出的这些卓越电活性性质,电活性聚合物还仿生机器人、应力传感器和声场研究中展现出潜力。这些实际应用使得电活性聚合物在未来成为更具吸引力的研究课题。它们已经在面部肌肉和手臂肌肉的人形机器人的执行器上的到了广泛应用。
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。

相关资料



- 有价值
- 一般般
- 没价值








24小时热门







推荐阅读
知识互答

关于我们

APP下载



{{item.time}} {{item.replyListShow ? '收起' : '展开'}}评论 {{curReplyId == item.id ? '取消回复' : '回复'}}