





-
 QQ空间
QQ空间
-
 QQ好友
QQ好友
-
 微信好友
微信好友
-
 新浪微博
新浪微博
控制理论
简介
借由线性二次高斯反馈(LQR)控制,在双摆系统上进行平滑的非线性轨迹规划
控制理论是
一个研究如何调整动态系统特性的理论。
科学中跨学科的领域,起源于工程及数学,逐渐的应用在许多社会科学中,例如心理学、社会学、犯罪学及 ( 英语 : financial system ) 。
控制系统可以视为具有四种机能的系统:量测、比较、计算及修正。这四个机能可以用五种元素来实现:感测器、换能器、发送器、控制器及最终控制元件。量测机能是由感测器、换能器及发送器执行,在实务应用上,这三个元素会整合在一个单体内,像是电阻温度计。比较和计算的机能是由控制器执行,可能是电子式的比例控制(P控制)、PI控制、PID控制、双稳态的迟滞控制,也可能是可编程逻辑控制器(PLC)。早期的控制器也可能是机械式的,像是离心式调速器或是化油器。修正机能是由最终控制元件执行,最终控制元件改变系统的输出,因此影响操纵或控制的变量。
范例
车辆的巡航定速系统是让车辆维持在由驾驶者设定的固定参考速度。此时控制器为巡航定速系统,车辆为受控体(plant),而系统是由控制器和车辆所组成,而控制变数是引擎节流阀的位置.会决定引擎可以产生的功率。
一种最单纯的作法是当驾驶者启动巡航定速系统时,固定引擎节流阀的位置。但是若驾驶者在平坦的路面启动巡航定速系统,车辆在上坡时速度会较慢,车辆在下坡时速度又会较快。这种的控制器称为开环控制器,因为没有去量测系统输出(车辆速度)并且影响控制变数(节流阀位置),因此此系统无法去针对车辆遇到的变化(像路面坡度的变动)去进行调整。
在闭环控制系统中,利用感测器量测系统输出(车辆速度),并将资料送入控制器中,控制器依资料调整控制变数(节流阀位置),来达到维持理想系统输出(使车辆速度和驾驶者设定的参考速度一致)。此时若车辆在上坡时,感测器会量到车辆的速度变慢,因此会调整节流阀位置,加大引擎输出功率,使马达加速。因为有量测车辆速度的回授,因此控制器可以配合车辆速度的变化进行动态调整。因此产生了控制系统中的“环”范式:控制变数影响系统输出,而再根据量测到的系统输出去调整控制变数。
历史

1768年 瓦特蒸气机 ( 英语 : Watt steam engine ) 上的离心式调速器
虽然许多控制系统在古代时就有了,但此领域较正式的分析是从离心式调速器的动态分析开始的,物理学家詹姆斯·马克士威在1868年为此撰写了论文《论调速器》(On Governors) ,其中描述了自激振荡的现象-由于系统时间延迟,使得系统过度补偿及不稳定的情形。因此也使得得许多科学家对此议题产生兴趣,其中马克士威的同学 爱德华·约翰·罗斯 ( 英语 : Edward John Routh ) 将马克士威的研究结果抽象化,应用在一般的线性系统中 ,阿道夫·霍维茨在1877年也独立均分析微分方程的稳定性,其结果即为今日的 罗斯-霍维茨定理 ( 英语 : Routh–Hurwitz theorem ) 。
动态系统控制的显著成就是载人的飞行.人类首次成功的载人飞行是由莱特兄弟在1903年12月17日达成的,其卓越之处不只是可以使机翼产生升力(这对当时的研究者是已知的),而是在于可以长时间控制其飞行。若要使飞行时间超过几秒钟,对飞机连续、可靠的控制是重要条件之一。
在二次大战时,控制系统是火控系统、 导引系统 ( 英语 : guidance system ) 及相关电子设备的重要组成之一。
有时会用机械的方式来增加系统的稳定性.例如 船舶稳定器 ( 英语 : Stabilizer (ship) ) 就是安装在船舶吃水线以下.横向张开的鳍片。现在的船舶有用陀螺仪控制的活动鳍片,可以调整攻角,抵抗风或浪作用在船上产生的横摇。
AIM-9响尾蛇导弹在导弹后方有一个小的控制表面,其外面是一个旋转的圆盘,称为 陀螺舵 ( 英语 : rolleron ) 或滚转安定翼。圆盘后的气流会以高速旋转,若导弹开始横摇,圆盘的陀螺力会使控制表面对正气流,减少横摇的影响。因此响尾蛇导弹用一个简单的机械组件代替一个可能非常复杂的控制系统。
太空竞赛也和精准的航天控制有关,而许多领域也越来越常用到控制理论,例如经济学。
对控制理论有重要贡献的科学家

导弹后的陀螺舵
许多科学家对控制理论有重要贡献,包括以下这几位:
皮埃尔-西蒙·拉普拉斯(1749-1827)在他有关概率论的著作中,发明了Z转换,现在Z转换用来处理离散控制系统的问题,Z转换是拉普拉斯变换的离散等效版本。
亚历山大·李亚普诺夫(1857–1918)在1890年代开始了 稳定性理论 ( 英语 : Stability theory ) 的研究。
哈罗德·史蒂芬·布莱克 ( 英语 : Harold Stephen Black ) (1898–1983)在1927年提出了负反馈放大器的概念,在1930年代开发了稳定的负反馈放大器。
哈里·奈奎斯特(1889–1976)在1930年代发展了针对回授系统的奈奎斯特稳定判据。
理查德·贝尔曼(1920–1984)在1940年代发展动态规划。
安德雷·柯尔莫哥洛夫(1903–1987)在1941年共同发展维纳–柯尔莫哥洛夫滤波(1941).
诺伯特·维纳(1894–1964)共同发展维纳–柯尔莫哥洛夫滤波,并在1940年代提出模控学一词。
约翰拉加齐尼 ( 英语 : John R. Ragazzini ) (1912–1988)在1950年代提出 数位控制 ( 英语 : digital control ) ,并在控制理论中应用加入Z转换。
列夫·庞特里亚金(1908–1988)提出了 庞特里亚金最小值定理 ( 英语 : Pontryagin"s minimum principle ) 及起停式控制。
传统控制理论
为了克服开环控制器的限制,在控制理论中导入了回授。闭环的控制器利用回授来控制动态系统的状态或输出。其名称来自系统中的讯息路径:程序输入(例如马达的电压)影响程序输出(例如马达的电流或转矩),利用感测器量测输出,再将量测资料送到控制器中处理,结果送回控制器作为输入信号之一,因此成为一闭环。
相对于开环控制器,闭环控制器有以下的优点:
噪声抑制能力(像巡航定速中的路面坡度)。
即使在数学模型有一些不确定性的情形下(如模型结构和实际系统不是完全符合,或是模型参数和实际数值不是完全一致),仍有一定程度的性能。
可以稳定不稳定的系统
减少对于参数变动的灵敏度
提升命令追随(命令变化时,系统配合命令变化)的性能
有些系统中,同时出现开环及闭环的控制,此时的开环会称为 前馈 ( 英语 : feed forward (control) ) ,目的是为了提升命令追随的性能。
PID控制器是常见的闭回路控制器架构。
闭环传递函数
更多资料:闭环传递函数
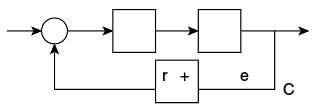
系统的输出 y(t) 借由感测器 F 量测后,和参考值 r(t) 相减,控制器 C 根据参考值和输出值的误差 e 调整受控体 P 的输入 u ,如图所示,这类的控制器称为闭环控制器。
由于只有一个输入和输出,此系统会称为SISO(单一输入单一输出)控制系统。MIMO(多重输入多重输出)控制系统是指输入或输出不只一个,在实务上也很常见,其输入变数和输出变数会用 向量 ( 英语 : Coordinate vector ) 表示,而不是单一数值的标量。在 分布参量系统 ( 英语 : distributed parameter systems ) 中,向量可能是无限维的,即一般的函数。
若假设控制器 C 、受控体 P 及感测器 F 都是线性及非时变的(各模组输入和输出的关系不随时间改变),可以将上述系统用拉普拉斯转换来分析,因此可以得到以下的关系:
其中 s {\displaystyle s} 为拉普拉斯转换中的复变数,若要求解 Y ( s )用 R ( s )表示,可得:
表示式 H ( s ) = P ( s ) C ( s ) 1 + F ( s ) P ( s ) C ( s ) {\displaystyle H(s)={\frac {P(s)C(s)}{1+F(s)P(s)C(s)}}\,\!} 即为系统的闭环传递函数,分子是从 r 到 y 的前馈(开环)增益,分母是1加上经过回授环的增益.即闭环增益,若If | P ( s ) C ( s ) | ≫ ≫ --> 1 {\displaystyle |P(s)C(s)|\gg 1\,\!} ,也就是说在各 s 下,其范数都很大,且 | F ( s ) | ≈ ≈ --> 1 {\displaystyle |F(s)|\approx 1\,\!} ,则 Y(s) 近似于 R(s) ,此时输出会紧密的追随参考输入。
PID控制器
更多资料:PID控制器
PID控制器可能是最常用到的控制器,PID的三个字母分别代表比例、积分和微分三个由误差值产生控制信号的方式。若 u(t) 为控制信号, y(t) 为量测到的输出, r(t) 为参考输入,误差为 e ( t ) = r ( t ) − − --> y ( t ) {\displaystyle e(t)=r(t)-y(t)} ,则PID控制器可以表示为以下的形式:
可以用调整 K P {\displaystyle K_{P}} , K I {\displaystyle K_{I}} 及 K D {\displaystyle K_{D}} 三个参数的方式,来达到较理想的控制器特性,调整参数的过程一般是用试误法,不太需要对于系统架构的了解。一般只用比例可以让系统稳定,积分项可以抑制步阶扰动(常常是程序控制的重要规格),也可以修正稳态误差,微分项一般是用来调整系统的阻尼系数。PID控制器是最广为人知的控制方式,但不适用在一些太过于复杂的系统,尤其是MIMO的系统。
将PID控制器的方程式进行拉普拉斯转换,可得:
因此PID控制器的传递函数如下:
需注意在实务上,PID控制器中不会使用纯微分器,一方面在实务上不可行,而且会放大高频噪声,容易造成共振。一般会用相位超前的补偿器,或是有低通 滚降 ( 英语 : Roll-off ) 的微分器。
现代控制理论
经典控制理论以频域分析为主,而现代控制理论利用时域的状态空间表示法,将系统中的输入、输出及状态变数之间的关系用一阶的微分方程表示。为了抽象化输入、输出及状态变数的数量,这些变数一般会用向量来表示,而微分方程或代数方程(当系统是线性时)则会以矩阵形式表示。状态空间表示法也称为时域分析,提供一个方便且简洁的方式针对多重输入及输出的系统建模及分析,在有输入和输出时,也可以利用拉氏转换,将系统所有的资料包括在其中。现代控制理论不同于频域分析,可以分析非线性或不是零初始条件的系统。状态空间就是指座标轴为状态变数的空间,系统的状态可以表示为状态空间中的一个向量 。
控制理论主题
稳定性
在控制理论中的稳定性是指控制系统的状态在特定条件下,可以维持在一定的范围内,不会发散,而在什么范围内才算是稳定则依系统种类而不同。
没有输入信号的动力系统,其稳定性是用李雅普诺夫稳定性来描述,也就是任何初始条件在 x 0 {\displaystyle x_{0}} 附近的轨迹均能维持在 x 0 {\displaystyle x_{0}} 附近
有输入信号的线性系统,其稳定性是用有界输入有界输出稳定性(BIBO 稳定性)来描述,针对任何有界的输入信号,其输出也是有界。
有输入信号的非线性系统,其稳定性是用输入-状态稳定性(input-to-state stability),结合了李雅普诺夫稳定性及类似有界输入有界输出稳定性的表示方式。
为了简单起见,以下的说明是针对连续时间及离散时间的线性时不变系统。
在数学上,一个因果性的系统若要稳定.其传递函数的所有极点的实部都要为负值。考量不同的控制系统,稳定的条件是极点满足以下的条件:
若是连续时间系统,使用拉普拉斯转换来求得传递函数,极点都要在复数平面的左半平面。
若是离散时间系统,使用Z转换来求得传递函数,极点都要在单位圆内。
两者的差异是因为拉普拉斯转换的左半平面,在共形映射后会对应单位圆内的区域。
若满足上述的条件,一系统即为渐近稳定的系统:渐近稳定控制系统中的变数会由其初值开始,持续的趋近于0,而且不会有一直持续的振荡。一直持续的振荡会出现在极点在虚轴上(连续时间系统)或是其极点大小为1(离散时间系统)。若一个简单的稳定系统,其响应不会递减也不是随时间变大,也不会震荡,此为 临界稳定 ( 英语 : marginal stability ) :系统的传递函数在复数平面原点处有不重复的极点。若传递函数中,实部为零的极点,其虚部不为零,表示系统在震荡。
若一离散系统的冲激响应为
则其Z转换后的传递函数为
在 z = 0.5 {\displaystyle z=0.5} 处有一个极点.因为极点在单位圆内,系统为BIBO(渐近)稳定。
若其冲激响应为
则其Z转换后的传递函数为
在 z = 1.5 {\displaystyle z=1.5} 处有一个极点.因为极点在单位圆外,因此系统没有BIBO稳定性。
许多数学工具可以分析系统的极点,其中也有一些是配合图表分析,像根轨迹、波德图及奈奎斯特图。
机械上的调整可以提升设备(及控制系统)的稳定性。水手会加入压舱水来提升船的稳定性,邮轮会加入防侧倾的鳍,从船舷往外延伸10米,而持续的绕着其中心轴旋转,产生一个和侧倾相反的力。
可控制性及可观测性
可控制性 ( 英语 : Controllability ) 和 可观测性 ( 英语 : observability ) 分别是输入和状态,输出和状态之间的性质。是在分析控制系统,决定控制策略或判断是否可以使系统稳定时所需要的重要性质。
可控制性 ( 英语 : Controllability ) 是指是可以用适当的控制信号作为输入,使特定状态变数的数值变成0,和利用输入调整状态变数的能力有关,若一个状态变数是不可控制的,表示没有输入可以调整这一个状态,若一系统中所有不可控制的状态变数,其动态特性都是稳定的,则此系统称为可稳定的(stabilizable)。 可观测性 ( 英语 : observability ) 是指可以用输出的量测及计算得到状态变数的值,若一个状态变数是不可观测的,表示无法确认此一状态是否稳定,也就无法用此状态来稳定整个系统。若一系统中所有不可控制的观测变数都是稳定的,则此系统称为可检测的(detectable)。
若以几何观点来看,若要控制系统中所有的状态,那些“不好”的状态都需是可控制且可观测的,才能确保闭环系统的良好特性。若系统中有一个状态不是可控制且可观测的,无法在闭环系统中调整其动态特性。若此状态的动态特性是不稳定的,此特性也会出现在闭环系统中,因此整个系统也是不稳定的。在状态空间转换到传递函数时,不可观测的的极点不会出现在传递函数中,因此在一些动力系统分析时,会选择使用状态空间表示法。
不可控制或不可观察的系统,可以用加入致动器或感测器的方式改善。
控制规格
在控制原理的基础下,已发展出许多不同的控制策略,从非常通用的(PID控制器),到针对特殊系统的控制,尤其是机器人或是航空器的巡航定速控制。
一个控制问题会有许多的规格,其中稳定性是必要条件的,不论系统开环稳定性如何,控制器需确保在闭环下是稳定的。性能不佳或是调整不当的控制器可能使系统变的不稳定,甚至可能比开环还要不稳定,这是应尽量要避免的。
有时会希望在闭环下有较快的动态特性,若是线性时不变系统,其稳定性及动态特性可以用传递函数极点的位置来表示,极点的实部越小,表示有更快的动态特性,一个稳定系统,其极点 λ λ --> {\displaystyle \lambda } 会符合 R e [ λ λ --> ] < 0 {\displaystyle Re[\lambda ] {\displaystyle \lambda } 会符合 R e [ λ λ --> ] λ λ --> ¯ ¯ --> {\displaystyle Re[\lambda ] 的条件,其中 λ λ --> ¯ ¯ --> {\displaystyle {\overline {\lambda }}} 为一个大于零的定值。
另一个常见的规格是对步阶扰动的抑制能力,在受控系统前加入积分器即可达到此一需求,其他种类扰动的抑制能力也可以透过其他的子系统才能达成。
其他“经典”的控制系统规格有些和闭环系统的时域响应有关:包括 上升时间 ( 英语 : Rise time ) (控制系统在扰动后,输出第一次到达理想数值的时间)、峰值过冲(控制系统在扰动后,稳定之前,输出的最大值)、安定时间(控制系统输出维持在理想数值范围的时间)在扰动后,稳定之前,输出的最大值)、四分之一衰减响应(quarter-decay)或其他规格。频域规格一般会和系统的鲁棒性(强健性)有关。
现在的性能指标也包括一些用积分量或其变体表示的追随误差,像绝对误差积分(IAE)、绝对时间误差积分(ITAE)、平方误差积分(IAE)、惯量中心(COI)等。
模型识别及强健性
控制系统一定会有一定程度的强健性。控制器一般是依照一个假设的受控系统模组再进行设计,强健性是指一控制器配合的受控系统和原来假设的系统有一点不同,控制器的特性不会有太大的变化。这个规格在实际的控制器中相当重要,因为很少实际系统会完全符合描述它的微分方程,在选择系统数学模型时,一般会进行简化,否则数学模型会非常复杂,甚至无法求得一个完整的模型。
确认受控系统统御方程的程序称为 系统识别 ( 英语 : System identification ) 。系统识别可以在离线(off-line)时进行,也就是在不是一般运作的情形下进行,例如可以执行一系列的量测程序,计算系统近似数学模型的参数,一般会是系统的传递函数或是矩阵。系统识别是利用系统的输入和输出进行,因此无法考虑没有观测性的系统动态。有时数学模型会直接由已知的物理方程式开始,例如针对有质量、弹簧及阻尼的系统,其数学方程为 m x ¨ ¨ --> ( t ) = − − --> K x ( t ) − − --> B x ˙ ˙ --> ( t ) {\displaystyle m{\ddot {x}}(t)=-Kx(t)-\mathrm {B} {\dot {x}}(t)} 。不过即使在设计控制器时已经使用受控系统完整的数学模型,其中用到的参数(称为标称参数)也无法绝对的精确,因此当受控系统的参数和标称参数有少许变化时,控制系统也需动作正常。
有些先进的控制技术会有在线(on-line)的系统识别,也就是在一般运作,控制器正常运作的条件下去计算系统模型的参数,当系统参数发生较大的变化(如机器人手臂释放一重物,负载变轻),控制器可以自动调整,仍然有正常的性能。
有关SISO(单一输入单一输出)系统的强健性分析,可以利用频域分析,考虑系统的传递函数,利用奈奎斯特图及波德图来达到,相关主题包括增益裕度及相位裕度及幅值裕度(amplitude margin)。但针对MIMO(多重输入多重输出)系统及较复杂的控制系统.需考虑由各控制策略可得到的理论结果,若是需要某一种特别的强健性性质,需考虑可以具有此性筫的控制技术。
在强健性需求中有一个较特别的,就是要求在输入变数及输出变数均有限制的情形下,控制系统可以正常运作。在真实世界中的信号都是有限的.但有可能控制系统送出的信号超过实际系统的限制,例如要使一个阀以超过其极限速度的速度旋转,这可能会让闭环系统出现不想要的特性,甚至会使致动器或感测器受损或毁坏。有些特殊的控制技术可以解决此问题,像 模型预测控制 ( 英语 : Model predictive control ) 及反终结(anti-wind up system),后者包括一个特殊的控制方块,可以确保控制信号不会超过限制值,以避免积分终结的情形。
系统分类
线性系统控制
针对MIMO的系统,极点的指定可以用开环系统的状态空间,再将极点放在指定位置,计算对应的回授矩阵。若在复杂的系统中,上述的程序需要用电脑辅助计算才能达到,而且不保证其强健性。而且一般而言无法量到所有的系统状态,在极点指定的设计时需加入观测器(observer)的设计。
非线性系统控制
像机器人学及航天产业中的程序一般都有高度非线性的动态,在控制理论中有时可以用线性化的方式转换为线性系统,再依线性系统的方式控制。但有时需要用一些可以配合非线性系统使用的 非线性控制 ( 英语 : nonlinear control ) 理论,例如回授线性化、 反推控制 ( 英语 : backstepping ) 、 滑动模式控制 ( 英语 : sliding mode control ) 等。轨迹线性化控制一般利用李亚普诺夫稳定性的基础。微分几何用做为一数学工具,将许多广为人知的线性控制概念扩展到非线性控制中,但其中又有其微妙之处,因此变成一个更有挑战性的问题。
分散式系统
分散控制系统 ( 英语 : Distributed control system ) 是指一个系统由多个控制器来控制。分散控制有几个好处,例如可以控制一个位在广大地理区域的系统,各控制器之间可以用通讯网络彼此交换资料,并协调彼此的行动。
主要控制策略
每一个控制系统首先都要保证其闭环特性的稳定性。线性系统可以用极点指定的方式达到。非线性系统一般会根据亚历山大·李亚普诺夫的理论,来确保系统的稳定性和内部动态无关。控制系统有许多不同的控制规格,是否可以符合所有控制规格则和考虑的系统模型及选择的控制策略有关。以下是一些主要控制策略的列表:
适应控制会在线识别程序中的参数,或修改控制器的增益,使系统有较佳的强性。适应控制最早在1950年代用在航天产业中,而且应用的非常成功。
分层控制系统 ( 英语 : hierarchical control system ) 是一种设备及控制软件皆依分层树方式规划的控制系统。当树中的连结用电脑网络来实现时,分层控制系统也可以视为是一种 网络控制系统 ( 英语 : Networked control system] ]] ) 。
智能控制会使用许多人工智能的方法来控制动态系统,会用到的方式包括人工神经网络、贝叶斯概率、模糊逻辑 、机器学习、进化计算及遗传算法等。
最优控制是一种特别的控制技术,控制器产生的控制信号需使某特定“成本指数”最佳化。以太空船为例,喷射引擎需在消耗油量最小的情形下将太空船带到期望的轨道。有二种最优控制的设计方式广泛的用在工业应用中,而且已证明这二个方式可以确闭环的稳定性。这二种方式分别是 模式预测控制 ( 英语 : Model Predictive Control ) (MPC)及 线性二次高斯控制 ( 英语 : linear-quadratic-Gaussian control ) (LQG)。第一个方式很明确的考虑系统中信号的限制条件,这是很多工业系统都有的重要特征,但其中的最佳控制只是作为满足所有限制的一个方式,不是最优化闭环系统中的实际性能指标。配合PID控制器的模式预测控制系统常用在程序控制中。
鲁棒控制明确的在控制器设计时考虑其不确定性。鲁棒控制的控制器可以克服分析用理想系统和实际系统之间的小误差。亨德里克·韦德·波德和其他早期提出的控制方式有一些鲁棒性。而1960到1970年代提出的状态空间法则较没有鲁棒性。现代控制中,由英国剑桥大学的 Duncan McFarlane 和Keith Glover提出的 H ∞ 环函数整形是一种鲁棒控制。鲁棒控制的目的是要在存在小的模型误差的情形下达到鲁棒性的性能以及稳定性。
统计控制 ( 英语 : Stochastic control ) 是在模型有不确定性的情形下进行控制。在典型的统计控制问题中,会假设在模型及控制器中存在随机的噪声及扰动,控制器设计时需考虑这些随机的变异。
能量整型控制 ( 英语 : Energy-shaping control ) 将控制器及受控系统视为是能量转换的元件,其控制策略是以能量保持的方式互连,以达到所需的特性。
自组织临界控制 ( 英语 : Self-organized criticality control ) 可定义为试图用自组织系统耗散能量的方式来影响流程。
相关条目
延伸阅读
Levine, William S. (编). The Control Handbook. New York: CRC Press. 1996. ISBN 978-0-8493-8570-4.
Karl J. Åström and Richard M. Murray.Feedback Systems: An Introduction for Scientists and Engineers. (PDF) . Princeton University Press. 2008. ISBN 0-691-13576-2.
Christopher Kilian. Modern Control Technology. Thompson Delmar Learning. 2005. ISBN 1-4018-5806-6.
Vannevar Bush. Operational Cirt Analysis. John Wiley and Sons, Inc. 1929.
Robert F. Stengel. Optimal Control and Estimation. Dover Publications. 1994. ISBN 0-486-68200-5.
Franklin; 等. Feedback Control of Dynamic Systems 4. New Jersey: Prentice Hall. 2002. ISBN 0-13-032393-4. 引文格式1维护:显式使用等标签 (link)
Joseph L. Hellerstein, Dawn M. Tilbury, and Sujay Parekh. Feedback Control of Computing Systems. John Wiley and Sons. 2004. ISBN 0-471-26637-X.
Diederich Hinrichsen and Anthony J. Pritchard. Mathematical Systems Theory I - Modelling, State Space Analysis, Stability and Robustness. Springer. 2005. ISBN 3-540-44125-5.
Andrei, Neculai.Modern Control Theory - A historical Perspective (PDF) . 2005 [ 2007-10-10 ] .
Sontag, Eduardo.Mathematical Control Theory: Deterministic Finite Dimensional Systems. Second Edition (PDF) . Springer. 1998. ISBN 0-387-98489-5.
Goodwin, Graham. Control System Design. Prentice Hall. 2001. ISBN 0-13-958653-9.
Christophe Basso.Designing Control Loops for Linear and Switching Power Supplies: A Tutorial Guide.. Artech House. 2012. ISBN 978-1608075577.
For Chemical Engineering
Luyben, William. Process Modeling, Simulation, and Control for Chemical Engineers. Mc Graw Hill. 1989. ISBN 0-07-039159-9.
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。

相关资料


- 有价值
- 一般般
- 没价值








24小时热门







推荐阅读
知识互答

关于我们

APP下载



{{item.time}} {{item.replyListShow ? '收起' : '展开'}}评论 {{curReplyId == item.id ? '取消回复' : '回复'}}