






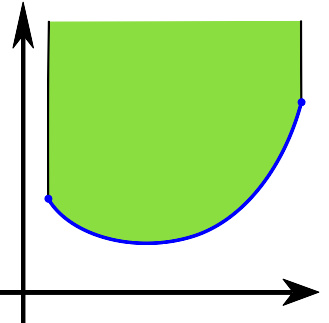
凸包
算法
增量式算法
逐次将点加入,然后检查之前的点是否在新的凸包上。由于每次都要检查所有之前的点,时间复杂度为O(n2){\displaystyle O(n^{2})}。
包裹法(Jarvis步进法)
首先由一点必定在凸包的点开始,例如最左的一点A1{\displaystyle A_{1}}。然后选择A2{\displaystyle A_{2}}点使得所有点都在A1A2{\displaystyle A_{1}A_{2}}的右方,这步骤的时间复杂度是O(n){\displaystyle O(n)},要比较所有点以A1{\displaystyle A_{1}}为原点的极坐标角度。以A2{\displaystyle A_{2}}为原点,重复这个步骤,依次找到A3,A4,...,Ak,A1{\displaystyle A_{3},A_{4},...,A_{k},A_{1}}。这总共有k{\displaystyle k}步。因此,时间复杂度为O(kn){\displaystyle O(kn)}。
葛立恒(Graham)扫描法
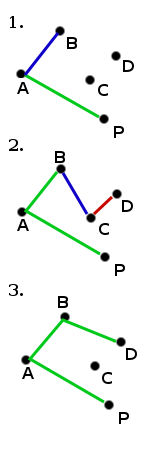
由最底的一点A_1开始(如果有多个这样的点,那么选择最左边的),计算它跟其他各点的连线和x轴正向的角度,按小至大将这些点排序,称它们的对应点为A2,A3,...,An{\displaystyle A_{2},A_{3},...,A_{n}}。这里的时间复杂度可达O(nlog -->n){\displaystyle O(n\log {n})}。
考虑最小的角度对应的点A3{\displaystyle A_{3}}。若由A2{\displaystyle A_{2}}到A3{\displaystyle A_{3}}的路径相对A1{\displaystyle A_{1}}到A2{\displaystyle A_{2}}的路径是向右转的(可以想象一个人沿A1{\displaystyle A_{1}}走到A2{\displaystyle A_{2}},他站在A2{\displaystyle A_{2}}时,是向哪边改变方向),表示A3{\displaystyle A_{3}}不可能是凸包上的一点,考虑下一点由A2{\displaystyle A_{2}}到A4{\displaystyle A_{4}}的路径;否则就考虑A3{\displaystyle A_{3}}到A4{\displaystyle A_{4}}的路径是否向右转……直到回到A1{\displaystyle A_{1}}。
这个算法的整体时间复杂度是O(nlog -->n){\displaystyle O(n\log {n})},注意每点只会被考虑一次,而不像Jarvis步进法中会考虑多次。
这个算法由葛立恒在1972年发明。它的缺点是不能推广到二维以上的情况。
单调链
将点按x坐标的值排列,再按y坐标的值排列。
选择x坐标为最小值的点,在这些点中找出y坐标的值最大和y坐标的值最小的点。对于x坐标为最大值也是这样处理。将两组点中y坐标值较小的点连起。在这条线段下的点,找出它们之中y坐标值最大的点,又在它们之间找x坐标值再最小和最大的点……如此类推。
时间复杂度是O(nlog -->n){\displaystyle O(n\log {n})}。
分治法
将点集X分成两个不相交子集。求得两者的凸包后,计算这两个凸包的凸包,该凸包就是X的凸包。时间复杂度是O(nlog -->n){\displaystyle O(n\log {n})}。
快包法(Akl-Toussaint启发式)
选择最左、最右、最上、最下的点,它们必组成一个凸四边形(或三角形)。这个四边形内的点必定不在凸包上。然后将其余的点按最接近的边分成四部分,再进行快包法(QuickHull)。
各种星形多面体的凸包
应用
图象处理
模式识别
地理信息系统
参考
Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, and Clifford Stein. Introduction to Algorithms, Second Edition. MIT Press and McGraw-Hill, 2001. ISBN 0262032937. Pages 955–956 of section 33.3: Finding the convex hull.
The Convex Hull of a 2D Point Set or Polygon, by Dan Sunday
参见
Carathéodory定理
Delaunay三角化
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。


- 有价值
- 一般般
- 没价值









24小时热门







推荐阅读


关于我们

APP下载


