





-
 QQ空间
QQ空间
-
 QQ好友
QQ好友
-
 微信好友
微信好友
-
 新浪微博
新浪微博
异步电动机
历史
异步电动机在1885年由意大利物理学家和电气工程师费拉里斯发明。1888年,费拉里斯提出实验报告,对旋转磁场作了严格的科学描述,为以后开发异步电动机、自起动电动机奠定了基础。费拉里斯相信他所提出的旋转磁场理论以及他所开发的新产品在科学上的价值远远超过物质上的价值,因此他有意不为自己的发明申请专利,而是在实验室向公众演示这些最新成果。他还倡导使用交流电系统。同年,尼古拉·特斯拉在美国取得了感应电动机的专利。一年之后, Mikhail Dolivo-Dobrovolsky 发明鼠笼型异步电动机。异步电动机的发展迅速,对于相同大小的异步电动机,额定功率由1897年的5.5kW发展到1976年的74.6kW。现在,鼠笼型异步电动机是使用最广泛的异步电动机。
异步电动机的用途
异步电动机主要用作电动机,其功率范围从几瓦到上万千瓦,是国民经济各行业和人们日常生活中应用最广泛的电动机,为多种机械设备和家用电器提供动力。例如机床、中小型轧钢设备、风机、水泵、轻工机械、冶金和矿山机械等,大都采用三相异步电动机(asynchronous motor)拖动;电风扇、洗衣机、电冰箱、空调器等家用电器中则广泛使用单相异步电动机。异步电动机也可作为发电动机,用于风力发电厂和小型水电站等。
异步电动机与感应电动机的关系
异步电动机 是一种交流电动机,其负载时的转速与所接电网频率之比不是恒定值。 感应电动机 ( Induction motor )是一种仅有一套绕组连接电源的异步电动机。在不致引起误解和混淆的情况下,一般可称感应电动机为异步电动机。IEC标准中指出:“感应电动机”一词,在许多国家中实际上是作为“异步电动机”的同义词使用,而其他一些国家则只使用“异步电动机”一词来表示这两种概念。
异步电动机的运行原理
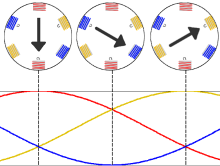
电枢中通入三相交流电时产生旋转磁动势和旋转磁场
旋转磁场是由三个不同相位线圈产生的磁场矢量加和形成
异步电动机与同步电动机最基本的区别在于,同步电动机转子中通入外加的励磁电流(通常是直流励磁)在定转子之间产生磁场。对于同步电动机,定子旋转磁场将对转子磁场产生电磁转矩,使转子沿轴向旋转。这种电动机之所以称为同步电动机是因为在稳态运行时,转子转速与定子电枢通入的交流电频率有严格的正比关系 n = 60 f p {\displaystyle n={\frac {60f}{p}}} ,其中 n 为同步转速, f 为交流电频率, p 为定子绕组极对数。.
与同步电动机相反,异步电动机转子绕组中没有使用外加电源供电,而是通过定子产生的旋转磁场(其转速为同步转速 n 1 )与转子绕组的相对运动,转子绕组切割磁感线产生感应电动势,从而使转子绕组中产生感应电流。转子绕组中的感应电流与磁场作用,产生电磁转矩,使转子旋转。由于当转子转速逐渐接近同步转速时,感应电流逐渐减小,所产生的电磁转矩也相应减小,当异步电动机工作在电动机状态时,转子转速小于同步转速。为了描述转子转速 n 与同步转速 n 1 之间的差别,引入转差率(slip),其定义为 s = n 1 − − --> n n 1 {\displaystyle s={\frac {n_{1}-n}{n_{1}}}} 。
励磁磁动势
定子三相对称绕组流过三相对称电流时,产生合成基波旋转磁动势。将该磁动势用空间矢量 F 0 表示,其幅值为
F 0 = m 1 2 4 π π --> 2 2 N 1 k d p 1 p I 0 {\displaystyle F_{0}={\frac {m_{1}}{2}}{\frac {4}{\pi }}{\frac {\sqrt {2}}{2}}{\frac {N_{1}k_{dp1}}{p}}I_{0}}
式中, N 1 和 k dp1 分别为定子绕组的每相串联匝数和基波绕组因数; p 为极对数; m 1 为定子绕组相数,对于三相异步电动机, m 1 =3。
转子绕组开路时,转子绕组中没有电流,不产生磁动势。此时,作用于电动机磁路上产生气隙磁场的磁动势只有定子磁动势 F 0 ,因此称 F 0 为励磁磁动势,相应的定子相电流 I ˙ ˙ --> 0 {\displaystyle {\dot {I}}_{0}} 称为励磁电流。
三相异步电动机
三相异步电动机 ,是一种工业用的电动机械,具有广泛的应用范围。三相异步电动机由三相电路为其提供动力,主要应用于挖掘,流体输送等需要提供动力的领域。在化工,物流,工程制造等领域都被广泛应用。
相关链接
鼠笼式电动机
绕线转子马达
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。



- 有价值
- 一般般
- 没价值








24小时热门







推荐阅读
知识互答

关于我们

APP下载



{{item.time}} {{item.replyListShow ? '收起' : '展开'}}评论 {{curReplyId == item.id ? '取消回复' : '回复'}}