





-
 QQ空间
QQ空间
-
 QQ好友
QQ好友
-
 微信好友
微信好友
-
 新浪微博
新浪微博
四维空间
日常误用
一般人说到“四维空间”时,经常是误指爱因斯坦在他的广义相对论和狭义相对论中提及的四维时空(叫做闵可夫斯基时空)概念。
这种普遍性的误用,是由于相对论的相关科普和文艺作品的流行。
关于这一点,考克斯特曾写道:
四维空间的定义
一个有四个空间性维数的空间(“纯空间性”的四维空间),或者说有四个两两正交的运动方向的空间。这种空间就是数学家们用来研究四维几何物体的空间。
从数学方面讲,普通三维空间集合的四维等价物是欧几里得四维空间,一个四维欧几里得赋范向量空间。一个向量的“长度”
以标准基底表示就是
也就是勾股定理向四维空间进行的很自然的类比。这就让两个向量之间的夹角很容易定义了(参见欧几里得空间)。
正交性
在人所熟悉的三维空间里,有三对主要方向:上下(高度),南北(纬度),东西(经度)。这三对方向两两正交,也就是说,它们两两成直角。从数学方面讲,它们在三条不同的坐标轴x、y、z上。计算机图形学中讲的深度缓冲指的就是这条 z 轴,在计算机的二维屏幕上代表深度。
纯空间性的四维空间另有一对垂直于其他三个主要方向的主要方向。这一对方向处在另一条同时垂直于x、y、z轴的坐标轴上,通常称作w轴。对这两个方向的命名,人们的看法不一。一些现行的命名有 安娜 / 卡塔 , 斯皮希图 / 斯帕提图 , 维因 / 维奥 ,和 宇普西龙 / 德尔塔 。这些额外的方向处于(实际上是垂直于)我们所能观察到的三维世界中的方向之外。
向量
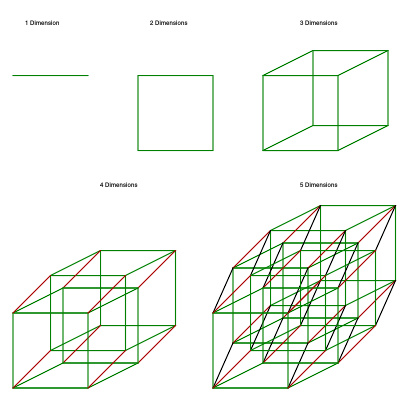
从一维到五维物体的演示。
纯空间性四维空间可以以向量的形式理解。一个四维向量同样由 方向 和 长度 (又叫做 模 )组成,它可以认为是对从一个点到另一个点向某个方向移动一定的长度的这个过程的描述。零向量是一个长度为零的特殊向量,也就是描述“不移动”这个过程的向量。
向量运算
数学上四维空间可以简单理解为有四个坐标轴的空间,即在普通坐标系中需要4个参数来描述其中一点的坐标。 假设一个描述四维空间中一个点的向量为 a ,有
上式也可以写成由4个基底(如 e 1 , e 2 , e 3 , e 4 )表示的形式,则
所以 a 可化为
四维向量的加法,减法和向量比例和空间向量的一致。空间向量中的数量积(或称为向量的“内积”、点乘)也被推广到四维向量中,如
下式可以用于计算一个四维向量的长度
而两个向量的夹角可由下式定义或计算
向量积(或称为向量的“外积”、叉乘)是一个常数,而空间向量的外代数定义为
这是双矢量的求值,以基底( e 12 , e 13 , e 14 , e 23 , e 24 , e 34 )在四维空间中的双矢构成了六维线性空间,它们可以被用来在四个方向产生旋转。
向量操作
通过改变一个四维向量的长度而不改变它的方向,我们可以对一个向量进行 伸缩 。这可以被想象成沿着原向量的方向伸长或缩短一段长度。一个长度为负数的向量与和它方向相反、长度相等的正数的向量互为相反向量。这可以想象成面沿着原向量的方向倒着走。
如果沿着两个首尾相接的向量运动,那么描述这种运动的直接结果的向量就叫做这两个向量的向量和。例如,如果一个人从点A开始沿某一向量运动到点B,又从点B开始沿另一个向量运动到点C,那么这两个向量的和向量就是从点A径直到点C的向量。
向量组合
给定一组四维向量,我们可以对它们进行任意的伸缩和求和操作来得到新的四维向量。以这种方式得到的所有的四维向量的集合就叫做这一组向量的组合。这种组合可以认为是一个点通过沿着一组向量中的某些向量移动所能达到的所有位置的集合。
给定几何图形X和向量集合S,如果从几何图形X内的一个点出发,沿着向量集合S的线性组合中的向量运动,能够到达X内所有其它的点,那么我们就说这个向量集合S可以 张 出几何图形X。
向量基底
能够张出一个几何图形X的最小向量集合叫做 X 的一组基底。不是所有的向量集合都是基底,因为它们可能含有赘余的向量。如果一个向量能通过集合中其他向量经过伸缩、求和而得到,那么这个向量就是赘余的。例如,如果一个集合中有两个平行的向量,那么它们中的一个可以被移除而 X 中的所有点仍然可以达到,因为能通过那个被移除的向量达到的点一定可以通过那个与它平行的向量达到。或者,如果一个向量是其他两个的和,那么它也完全可以被移除。零向量总是赘余的,因为它并不能让一个人达到任意一个除他已经能够达到的点之外的点。
维数
通过把任意一个可以张出几何图形 X 的向量集合中的所有赘余向量移除,我们可以过的一组 X 的基底。选定的初始向量集合不同,获得的能张出 X 的基底也可能不同;但是,可以证明所有这些基底中都含有相同数量的向量。这个数量就叫做 X 的 维数 。换句话说,如果 X 最少需要 n 个向量来张出它,那么 X 就是 n 维的。
直观地,一个图形的维数可以认为是一个人要想达到这个图形中所有的点,需要运动的所有不同方向的数目。
例如,一个点是一个零维图形。我们不需要任何向量来张出它,因为如果我们从这个点出发,我们已经到达了它所有的位置。
一条直线是一个一维图形。从直线的某一个点上出发,我们需要一个指向这个直线的方向的向量来到达到直线上的其他点。只要一个向量就足够了,因为通过不同程度的伸缩它我们可以到达直线上的任意其他点。
一个平面是一个二维图形。给定平面上的一个起始点,我们至少需要两个互不平行的向量来张出这个平面。如果只有一个向量,我们只能到达某一条直线上的所有点;所以我们需要有另一个与它不平行的向量来往这条直线的“两边”走,从而到达平面上的其他点。只要两个方向就足够了,因为我们可以顺着(或逆着)前一个向量走不同的距离,再往两边走不同的距离来到达平面上的任意点。也可以把平面理解成许多平行线的“堆积”;要想在二维平面上从一点运动到另一点,我们需要首先沿着线平行线运动,再穿过这些平行线向另一个方向运动。
在我们的眼中,空间是三维的。要达到空间中的某一点,我们不仅要向前向后、向两边走,还需要上下移动。换句话说,需要第三个向量才能到达空间中的所有点。同样,也可以把空间理解成许多平行平面的堆积:要想在空间中从一点运动到另一点,我们可以先沿着一个方向前后走,再向两边走,最后上下走。
四维空间则是一个需要四个不同方向才能到达其中所有点的空间。这种空间可以认为是许多平行的三维空间的堆积。要理解这个概念,想象一下把一张张纸并列叠起来的过程。如果人不把它们一个个堆叠起来,这些纸张不会延伸进三维空间。以同样的方式,要想进入四维空间,就必须向一个新的方向运动,这个方向必须是在三维空间以外的。要达到四维空间中的每一个点,一个人不仅需要向前后、左右、上下移动,还要沿着一对新的方向运动,即上文提到的安娜/卡塔,或者叫维因/维奥等等。
维数类比
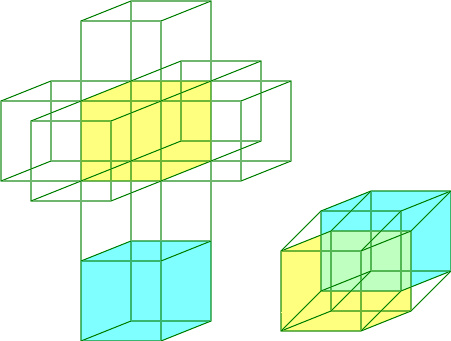
一个超正方体的展开图。
要理解四维空间的本性,我们可以通过与低维度类比进行推广。维数类比是指通过研究 n - 1维与 n 维之间的关系,来推断 n 维与 n + 1维之间会有什么样的关系。
埃德温·阿伯特·阿伯特在他的书平面国中运用维数类比,讲述了在一个扁平得就像一张纸的二维世界中生活的一个正方形的故事。 在这个正方形的眼中,生活在三维世界中的人们拥有近乎神的力量,因为他们能在不打破(二维的)保险箱的情况下从其中把东西(通过移入移出三维空间的方法)取出,能看到所有在二维世界看来是被挡在墙后面的东西,甚至能站在离二维世界几英寸的地方来保持“隐形”。
通过应用维数类比,人们可以推断,四维空间中的人在我们三维的视角看来应该有类似的神奇能力。鲁迪·拉克在他的小说《空间世界》( Spaceland )中展示了这一点。 小说的主人公就遇到了具有神奇能力的四维人。
射影
射影是应用维数类比来想象四维空间的一种有效方法。射影是指用 n - 1维空间中的图形来代表 n 维空间中的图形。比如说,电脑屏幕是二维的,而所有三维的人、地方、东西等等的照片都是以射影的形式展现在二维平面上的。这会把三维世界中的深度去除,代之以间接的信息。人眼的视网膜也是由一层二维的感受器构成的,但是人脑能够察知三维物体的真实形状;这是根据阴影、近大远小、双眼视觉等间接信息推断得来的。画家们经常利用透视来赋予二维的图画一种三维(也就是立体)的感觉。
相似地,四维空间中的物体可以以数学的方法射影到三维空间中,从而使观察它们变得更容易。在这种情况下,一个四维的眼的“视网膜”是由一个三维“层”的感受器构成的。假设一个人有这样一只眼,他就可以根据三维图形中的间接信息推断出四维物体的真实形状。
三维物体在人眼视网膜上留下的透视射影会造成近大远小的现象,这样大脑就可以推断出三维的深度。以同样的方式,四维物体的透视射影会造成相似的“近大远小”的效果。通过应用维数类比,我们可以从这种效果中推断出四维的“深度”。
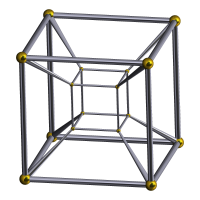
下面的图片演示了这种规律。我们可以比较一下三维的正方体和类似的四维超正方体的三维射影。
阴影
一个与射影有密切关系的方法是把四维几何体的阴影在三维空间中显示出来。
假设有一丛光射向一个三维物体,则其阴影会在二维平面上显示出来。如此类推,光射向二维物体会产生一维阴影,射向一维物体会产生零维阴影,也就是无光的一点;另一方面,光射向四维物体会产生三维阴影。
如果一个立方体的线框置于光源下,其阴影为一正方形位于另一正方形以内,并且相对的点相连。同样,如果四维正方体置于光源下,其阴影便会是一三维正方体位于另一正方体之内,并且相对的点相连。(注意,此处显示的图片乃四维正方体的三维阴影在二维平面上的投影。)
边界
维度类比法也可帮我们推论出高维度物体的基本属性。例如,二维物体有一维的边界,正方形的边界为一维的线;三维物体有二维的边界(表面),正方体的表面为二维的平面。我们可以推论,四维物体便有三维的“边界”,就是超正方体的外围是三维的正方体。以上属性对如何表达四维物体的三维投影很有帮助。
视觉观测
作为三维空间中的生物,我们的眼睛只能看到这个世界的二维投影。生活在四维空间的生物便能看到它们的世界的三维投影。例如,它们可以同时看到一个正方体的所有六面,还能同时看到正方体中的物体;其实我们也可以同时看到二维平面上的正方形的全部四条边及其中的物体。四维生物能同一时间看到三维空间中的所有点、物体和物体的内部,这些是我们在三维空间中看不到的。
限制
类比法是理解高维度空间的一项很好的方法,但我们若不经过更进一步的计算仍不可以妄下结论。以下是圆形周界公式: C = 2 π π --> r {\displaystyle C=2\pi r} 及球体表面积公式: A = 4 π π --> r 2 {\displaystyle A=4\pi r^{2}} 。 正确公式为 V = 2 π π --> 2 r 3 {\displaystyle V=2\pi ^{2}r^{3}} 。
几何
四维几何比三维几何丰富得多,因为其额外的维度提供了更多的自由空间。
三维空间中,我们可以从多边形做出多面体;同样地,在四维空间中我们可以从多面体做出多胞体(四维多胞形)。三维空间中存在5种正多面体,以柏拉图立体称之;而四维空间中存在6种正多胞体,均从柏拉图立体类比而成。三维空间中存在13种半正多面体(阿基米德立体),而在四维空间中存在58种半正多胞体。
在三维空间,我们可以把圆形向第三维度拉伸形成圆柱体。而在四维空间,我们可以向第四维度拉伸球体形成球柱体(球体为“盖”的柱体),或拉伸圆柱体形成圆柱棱体。我们还可以取两个球体的笛卡尔积得到一个双圆柱体。以上三种均可在四维中“滚动”,但各有不同的属性。
三维中,曲线可以形成结,但曲面并不可以(除非互相交叉穿越)。但在四维中,以曲面形成的结可以经过延伸到第四维度而解开。由于自由度更大,四维中的曲面结比三维中的线结要复杂的多。克莱因瓶便是其中一个例子。另一例子为实射影平面。
超球体
在四维欧几里得空间中与P 0 点有相同距离R的所有点的集合能形成一个超曲面,称为三维球面。此超曲面之包含空间的超体积为:
这是广义相对论中的罗伯逊-沃尔克度规,其中 R 由 R(t) 代替, t 代表宇宙年龄。 R 值的随时间的加大或减低表示宇宙膨胀或收缩,这取决于宇宙质量密度。
参见
欧几里得空间
欧几里得几何
维度
五维
多胞形
三维曲面
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。

相关资料


- 有价值
- 一般般
- 没价值








24小时热门







推荐阅读

关于我们

APP下载



{{item.time}} {{item.replyListShow ? '收起' : '展开'}}评论 {{curReplyId == item.id ? '取消回复' : '回复'}}