





-
 QQ空间
QQ空间
-
 QQ好友
QQ好友
-
 微信好友
微信好友
-
 新浪微博
新浪微博
超静定
静定系统
如果,除去这梁在 B 点的支撑 ,就没有 VB{\displaystyle V_{B}\,\!} 反应力,整个系统成为静定的。则解答为
如果,我们将 A 点的支撑改为滚子。那么,只剩下三只反应力作用在这梁上(没有 HA{\displaystyle H_{A}\,\!} )。但是,这梁现在可以作水平移动;这系统变为偏约束的。进一步研究,这问题有两个未知数,VA{\displaystyle V_{A}\,\!} 与 VC{\displaystyle V_{C}\,\!}。我们可以用 ∑ ∑ -->Fy=0{\displaystyle \sum F_{y}=0\,\!} 与 ∑ ∑ -->M→ → -->=0{\displaystyle \sum {\vec {M}}=0\,} 这两个方程来求解答。得到的答案与前面相同。可是,除非 FH=0{\displaystyle F_{H}=0\,\!} ,方程 ∑ ∑ -->Fx=0{\displaystyle \sum F_{x}=0\,\!} 无法被满足。
超静定度
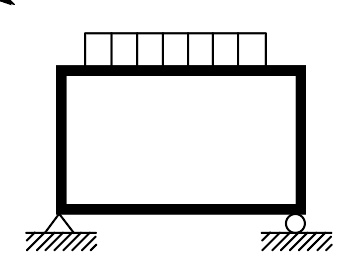
图 2 ,一个静定系统。
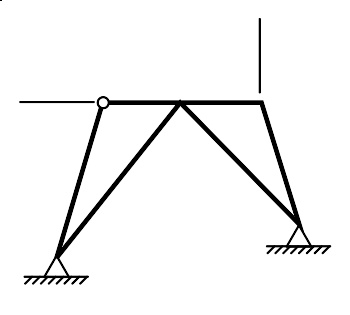
图 3 ,一个不稳定系统。
一个系统的超静定度表示的是系统中未知量多出系统静力方程的数量,超静定度越大,表示系统“超稳定”的程度越高。超静定度h{\displaystyle h\,\!}的符号有三种形式:
h < 0, 此时系统是不平衡的。
h = 0, 此时系统是静定的。
h > 0, 此时系统是超静定的。
一个系统的超静定度的表达式是 M− − -->N{\displaystyle M-N\,\!}。这里,
M{\displaystyle M\,\!} 是系统所有未知变量的数量。
N{\displaystyle N\,\!} 是系统能够写出的所有静力平衡方程的数量。
计算超静定度的方法主要有计数法和重构法。计数法方便快捷;重构法则可以更深刻地理解系统的内在构成。下面详细解释计数法。
计数法:
这里主要处理二维问题。 对于一个二维桁架,首先需要数出其杆或部件数p{\displaystyle p\,\!}。 其次计算出能写出的所有静力方程数目。对于一个静态物体,其满足三条静力方程:水平受力平衡,垂直受力平衡和力矩平衡。所以可以写出 N=3∗ ∗ -->p{\displaystyle N=3*p}
最后要求出系统所有未知量,或者说约束条件的个数M{\displaystyle M\,\!}。约束条件分为外约束条件m{\displaystyle m\,\!}和内约束条件n{\displaystyle n\,\!};外约束条件指的是因与外界,如地面,基座等连结而出现的约束条件;相反地,内约束条件是指因系统内部的连结而出现的约束条件。对于与外部的连结,我们区分三种情况:
固定节:在平面中禁止所有的三个活动方式:平面和水平的移动以及旋转。故有三个约束条件,对应的三个未知量为水平和垂直的受力以及力矩。
球形铰:在平面中固定了水平和垂直方向上的移动,只允许旋转,故有两个约束条件,其对应的未知量为两个方向上的应力。
平面撑:在平面中只禁止垂直支撑面方向上的移动,允许顺着该支撑面的移动和旋转。故只有一个约束条件,对应垂直该支撑面的移动。
把所有外部链接所形成的约束条件相加,便可得到外约束条件数m{\displaystyle m\,\!}。 现在把所有外部链接去除,孤立内部的系统。对于内部的连结我们区分两种情况:
铰链:只允许围绕其轴的转动,禁止水平和垂直的移动。连带的约束条件数为2乘连结与该点的杆或部件的数量减一。
固定节:禁止平面内三种方式的活动。连带的约束条件数为3乘连结与该点的杆或部件的数量减一。
把所有内部链接形成的约束条件相加,便可得到内约束条件数n{\displaystyle n\,\!}。
于是就能算出该系统的超静定度为 h=M− − -->N=m+n− − -->N{\displaystyle h=M-N=m+n-N}。
方法应用举例:对于图二的结构,我们认为整个框架即是一个部件。于是静力方程数量为 N=3∗ ∗ -->1=3{\displaystyle N=3*1=3} 左下角的平面撑附带一个约束条件。右下角的球形铰附带两个约束条件。 去除所有外部链接后,发现没有内部链接,所以取内约束条件为零。 于是可以算出 h=(1+2)+0− − -->3=0{\displaystyle h=(1+2)+0-3=0} 所以系统是静定的。
对于图三的结构,我们数出有六个杆件。故静力方程数量为 N=3∗ ∗ -->6=18{\displaystyle N=3*6=18} 左下角和右下角的平面撑各附带一个约束条件,所以外约束条件数量为m=1+1=2{\displaystyle m=1+1=2}。 去除两个外部链接后,发现有五个内部链接。四角的铰链各有两个杆件集结,所以各形成2∗ ∗ -->(2− − -->1)=2{\displaystyle 2*(2-1)=2}个约束条件。而上边中间的铰链有四个杆件集结,所以有2∗ ∗ -->(4− − -->1)=6{\displaystyle 2*(4-1)=6}个约束条件。于是内约束条件数量为n=2∗ ∗ -->4+6=14{\displaystyle n=2*4+6=14} 求出超静定度为 h=2+14− − -->18=− − -->2{\displaystyle h=2+14-18=-2} 所以此系统不平衡。
参阅
结构工程学
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。

- 有价值
- 一般般
- 没价值








24小时热门







推荐阅读

知识互答

关于我们

APP下载



{{item.time}} {{item.replyListShow ? '收起' : '展开'}}评论 {{curReplyId == item.id ? '取消回复' : '回复'}}