

更多文章
更多精彩文章




 QQ空间
QQ空间
 QQ好友
QQ好友
 微信好友
微信好友
 新浪微博
新浪微博
定义
假设一个物理系统符合完整系统的要求,即所有广义坐标都互相独立,则拉格朗日方程成立:
其中,L(q, q˙ ˙ -->, t){\displaystyle {\mathcal {L}}(\mathbf {q} ,\ {\dot {\mathbf {q} }},\ t)\,\!}是拉格朗日量,q=(q1,q2,… … -->,qN){\displaystyle \mathbf {q} =\left(q_{1},q_{2},\ldots ,q_{N}\right)\,\!}是广义坐标,是时间t{\displaystyle t\,\!}的函数,q˙ ˙ -->=(q˙ ˙ -->1,q˙ ˙ -->2,… … -->,q˙ ˙ -->N){\displaystyle {\dot {\mathbf {q} }}=\left({\dot {q}}_{1},{\dot {q}}_{2},\ldots ,{\dot {q}}_{N}\right)\,\!}是广义速度。
导引
在分析力学里,有三种方法可以导引出拉格朗日方程。最原始的方法是使用达朗贝尔原理导引出拉格朗日方程(参阅达朗贝尔原理);更进阶层面,可以从哈密顿原理推导出拉格朗日方程(参阅哈密顿原理);最简明地,可以借用数学变分法的欧拉-拉格朗日方程来推导:
设定函数y(x){\displaystyle \mathbf {y} (x)\,\!}和f(y, y˙ ˙ -->, x){\displaystyle f(\mathbf {y} ,\ {\dot {\mathbf {y} }},\ x)\,\!}:
其中,x{\displaystyle x\,\!}是自变数(independent variable)。
若y(x)∈ ∈ -->(C1[a, b])N{\displaystyle \mathbf {y} (x)\in (C^{1}[a,\ b])^{N}\,\!}使泛函J(y)=∫ ∫ -->abf(y, y˙ ˙ -->, x)dx{\displaystyle J(\mathbf {y} )=\int _{a}^{b}f(\mathbf {y} ,\ {\dot {\mathbf {y} }},\ x)dx\,\!}取得局部平稳值,则在区间(a, b){\displaystyle (a,\ b)\,\!}内,欧拉-拉格朗日方程成立:
现在,执行下述转换:
设定独立变数x{\displaystyle x\,\!}为时间t{\displaystyle t\,\!}、
设定函数yi{\displaystyle y_{i}\,\!}为广义坐标qi{\displaystyle q_{i}\,\!}、
设定泛函f(y, y˙ ˙ -->, x){\displaystyle f(\mathbf {y} ,\ {\dot {\mathbf {y} }},\ x)\,\!}为拉格朗日量L(q, q˙ ˙ -->, t){\displaystyle {\mathcal {L}}(\mathbf {q} ,\ {\dot {\mathbf {q} }},\ t)\,\!},
则可得到拉格朗日方程
为了满足这转换的正确性,广义坐标必须互相独立,所以,这系统必须是完整系统。
拉格朗日量是动能减去位势,而位势必须是广义位势。所以,这系统必须是单演系统。
半完整系统
一个不是完整系统的物理系统是非完整系统,不能用上述形式论来分析。假若,一个非完整系统的约束可以以方程表示为
则称此系统为半完整系统。
半完整系统可以用拉格朗日形式论来分析。更具体地说,分析半完整系统必须用到拉格朗日乘子λ λ -->i{\displaystyle \lambda _{i}\,\!}:
其中,λ λ -->i=λ λ -->i(q, q˙ ˙ -->, t){\displaystyle \lambda _{i}=\lambda _{i}(\mathbf {q} ,\ {\dot {\mathbf {q} }},\ t)\,\!}是未知函数。
由于这N{\displaystyle N\,\!}个广义坐标中,有n{\displaystyle n\,\!}个相依的广义坐标,泛函f(y, y˙ ˙ -->, x){\displaystyle f(\mathbf {y} ,\ {\dot {\mathbf {y} }},\ x)\,\!}不能直接被转换为拉格朗日量L{\displaystyle {\mathcal {L}}\,\!};必须加入拉格朗日乘子,将泛函f(y, y˙ ˙ -->, x){\displaystyle f(\mathbf {y} ,\ {\dot {\mathbf {y} }},\ x)\,\!}转换为L+∑ ∑ -->i=1n λ λ -->igi{\displaystyle {\mathcal {L}}+\sum _{i=1}^{n}\ \lambda _{i}g_{i}\,\!}。这样,可以得到拉格朗日广义力方程:
其中,F{\displaystyle {\boldsymbol {\mathcal {F}}}\,\!}是广义力,F=∂ ∂ -->∂ ∂ -->q(∑ ∑ -->i=1n λ λ -->igi)− − -->ddt[∂ ∂ -->∂ ∂ -->q˙ ˙ -->(∑ ∑ -->i=1n λ λ -->igi)]{\displaystyle {\boldsymbol {\mathcal {F}}}={\frac {\partial }{\partial \mathbf {q} }}\left(\sum _{i=1}^{n}\ \lambda _{i}g_{i}\right)-{\frac {d}{dt}}\left[{\frac {\partial }{\partial {\dot {\mathbf {q} }}}}\left(\sum _{i=1}^{n}\ \lambda _{i}g_{i}\right)\right]\,\!}。
这N{\displaystyle N\,\!}个广义力运动方程加上n{\displaystyle n\,\!}个约束方程,给出N+n{\displaystyle N+n\,\!}个方程来解N{\displaystyle N\,\!}个未知广义坐标与n{\displaystyle n\,\!}个拉格朗日乘子。
实例
这个段落会展示拉格朗日方程的两个应用实例。第一个实例展示出,用牛顿方法与拉格朗日方法所得的答案相同。第二个实例展示出拉格朗日方法的威力,因为这问题比较不适合用牛顿方法来分析。
自由落体
思考一个粒子从静止状态自由地下落。由于引力F=mg{\displaystyle F=mg\,\!}作用于此粒子,应用牛顿第二定律,可以得到运动方程
其中,x-坐标垂直于地面,由初始点(原点)往地面指。
这个结果也可以从拉格朗日形式论得到。动能T{\displaystyle T\,\!}是
位势V{\displaystyle V\,\!}是
所以,拉格朗日量L{\displaystyle {\mathcal {L}}\,\!}是
将L{\displaystyle {\mathcal {L}}\,\!}代入拉格朗日方程,
运动方程是
与牛顿方法的运动方程相同。
具有质量的移动支撑点的简单摆
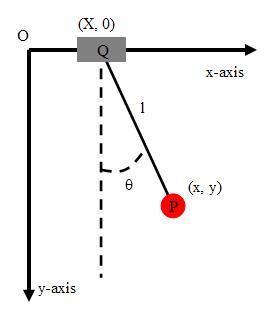
思考一个简单摆系统。系统的x-轴平行于地面,y-轴垂直于x-轴,指向地面。摆锤P的质量是m{\displaystyle m\,\!},位置是(x, y){\displaystyle (x,\ y)\,\!}。摆绳的长度是l{\displaystyle l\,\!}。摆的支撑点Q的质量是M{\displaystyle M\,\!}。这支撑点Q可以沿着一条平行于x-轴的直线移动。点Q的位置是(X, 0){\displaystyle (X,\ 0)\,\!}。摆绳与y-轴的夹角是θ θ -->{\displaystyle \theta \,\!}。那么,动能是
位势为
所以,拉格朗日量是
两个约束方程为
将约束方程代入拉格朗日量方程,
特别注意,在这里,广义坐标是X{\displaystyle X\,\!}与θ θ -->{\displaystyle \theta \,\!}。应用拉格朗日方程,经过微分运算,对于X{\displaystyle X\,\!}坐标,可以得到
运动方程为
由于拉格朗日量不显含广义坐标X{\displaystyle X\,\!},称X{\displaystyle X\,\!}为可略坐标,而其相对应的广义动量pX{\displaystyle p_{X}\,\!}是常数K1{\displaystyle K_{1}\,\!}:
对于θ θ -->{\displaystyle \theta \,\!}坐标,可以得到
所以,运动方程为
假如用牛顿第二定律,则必须仔细地辨明所有的相关作用力。这是一项既困难又容易出错的工作。
相关条目
拉格朗日量
拉格朗日力学
哈密顿力学
牛顿力学
变分法
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。




















{{item.time}} {{item.replyListShow ? '收起' : '展开'}}评论 {{curReplyId == item.id ? '取消回复' : '回复'}}